
新一代智能巡检机器人 /导轨式机器人
- 厂家信息
- 产品信息
- 规格参数
- 技术文档
产品图片
新一代智能巡检机器人
导轨式机器人






智能巡检机器人系统主要由导轨式巡检机器人、软件平台、供电平台、通信平台、定点摄像头及其他辅助设备组成。能实时管理及控制机器人在线进行巡检任务作业;通过部署在主控室的后台监控平台,能够实时管理及控制机器人在线进行巡检任务作业;同时,巡检机器人和其他定点智能监测设备通过信息专网,能够将机器人巡检画面及巡检结果、定点智能设备监测数据及分析结果等信息上传至后台监控平台,实时对现场前端设备的状态进行监控管理。
巡检机器人工作环境条件:
● 环境温度:最高温度: +40 ℃,最低温度: 10 ℃;
● 海拔高度:850m/1150m;
● 年平均相对湿度:70%;
● 地震烈度:8 度;
● 使用环境:矿山井下、粉尘、潮湿场所,无瓦斯煤尘爆炸。
巡检机器人通信平台:
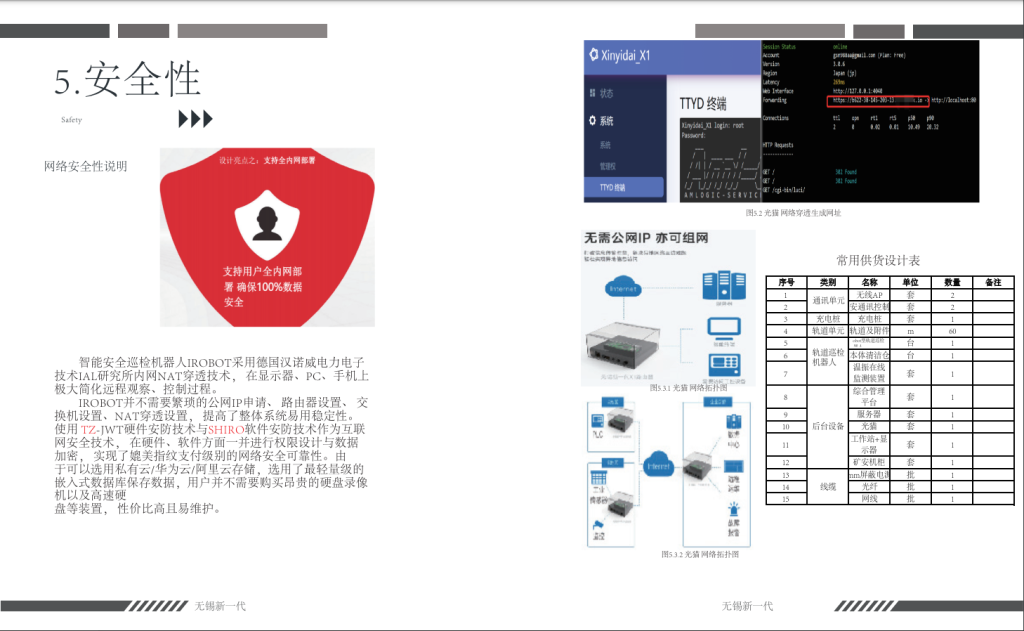
整套机器人系统通过在区域搭建无线局域网与后台服务器实时通信控制。现场沿设备巡检路线进行无线AP部署或者LAN网线部署,机器人本体通过无线信号与局域网连接,进行实时的图像及控制命令传输。
智能巡检综合管理平台:
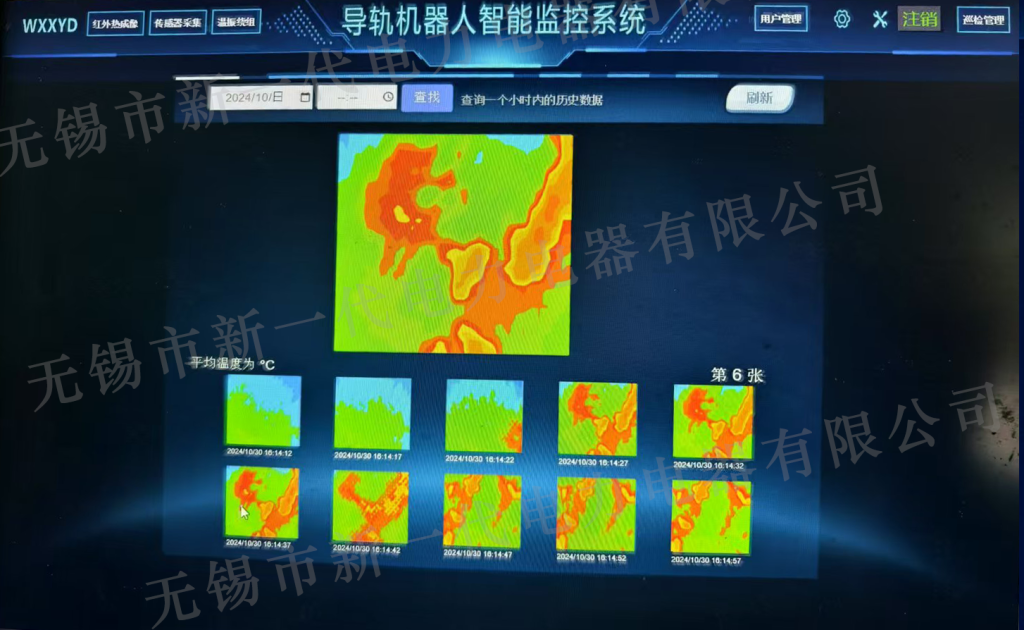
作为一站式监控管理平台,支持接入巡检机器人、定点摄像机、热像仪、传感器等IOT设备,形成以机器人为核心的综合智能巡检管理平台,提供多种图像、视频算法模型实现人、设备、环境等多目标识别分析。平台基于B/S架构的WEB数据浏览模式与运行平台构成,一般部署在中控室服务器中,支持MODBUS、IEC61850、CAN、MQTT、HTTP、RTSP等多种标准工业协议集,可实现外部系统与智能巡检系统综合管理平台的数据交互和联动。平台支持多账号同时登录,多角色分布管理。包括了实时视频查看、红外热成像查看、传感数据查看、告警信息查看、机器人运行地图查看与设置、云台预置位设置、录像回放、报表查看、机器人管理等全面功能。
智能巡检机器人
系统整合计算机编程技术、AI图像识别和定位技术、模式识别技术、无线信号传输技术、智能控制技术、机电控制技术、多传感器融合技术等多种高新技术手段,集软件、机械、电子、控制、传感、材料等多学科于一体,通过对图像、声音、温度、振动等数据的采集,完成设备运行状态,仪表数据,控制柜指示灯状态等巡检任务,在不影响现场系统设备的正常运行、不遮挡人员巡检通道及消防喷淋等设备条件下,最大限度的实现无死角、无盲点的巡检,达到井下变电所无人或少人值守。
机器人AI中央控制台具备多机协作调度、任务规划、高复杂环境感知等多种高阶控制算法;数据协议分发、数据采集清晰分析、支持多种标准协议接入等数据处理手段;图像识别、音频采集、气体检测等多种智能算法;支持摄像头、传感器、第三方系统独立设备等外部独立设备或系统接入。
智能巡检机器人系统主要由履带式巡检机器人(NVIDIA Jetson主控算力不低于20TOPS 可运行ROS/ROS2)、充电底座及配电单元、软件平台、供电平台、通信平台、定点摄像头及其他辅助设备组成。
智能巡检机器人平台
平台根据四合一气体传感器设置实时报警,检测的气体为:氧气、一氧化碳、一氧化氮、二氧化氮
低报警数值:19.5%Vol、35ppm、14ppm、2.5ppm
高报警数值:23.5ppm%Vol、70ppm、75ppm、5ppm
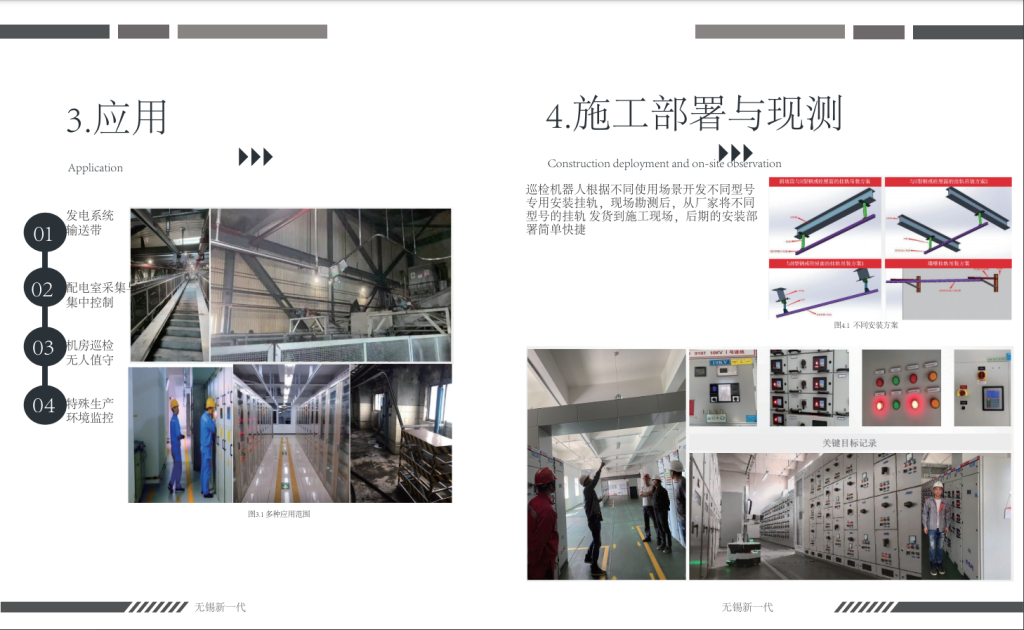
系统采用多种终端设备及管理系统有机结合,整合计算机编程技术、图像识别和定位技术、模式识别技术、无线信号传输技术、智能控制技术、机电控制技术、多传感器融合技术等多种技术手段,基础配置功能包括地图扫描、巡逻任务制定等配置功能,实时监控功能包括实时视频展示、实时数据展示、远程控制、远程对讲、告警查看、巡逻报告查看等功能,满足管理人员通过移动客户端进行监控的目的,提升事件处理效率,最大限度的实现无死角、无盲点的巡检,达到井下变电所、水泵房无人或少人值守。
暂无特定尺寸,如需详谈请联系本公司技术员 高先生17625000096
智能巡检机器人系统主要由导轨式巡检机器人、软件平台、供电平台、通信平台、定点摄像头及其他辅助设备组成。能实时管理及控制机器人在线进行巡检任务作业;通过部署在主控室的后台监控平台,能够实时管理及控制机器人在线进行巡检任务作业;同时,巡检机器人和其他定点智能监测设备通过信息专网,能够将机器人巡检画面及巡检结果、定点智能设备监测数据及分析结果等信息上传至后台监控平台,实时对现场前端设备的状态进行监控管理。
巡检机器人工作环境条件:
● 环境温度:最高温度: +40 ℃,最低温度: 10 ℃;
● 海拔高度:850m/1150m;
● 年平均相对湿度:70%;
● 地震烈度:8 度;
● 使用环境:矿山井下、粉尘、潮湿场所,无瓦斯煤尘爆炸。
巡检机器人通信平台:
整套机器人系统通过在区域搭建无线局域网与后台服务器实时通信控制。现场沿设备巡检路线进行无线AP部署或者LAN网线部署,机器人本体通过无线信号与局域网连接,进行实时的图像及控制命令传输。
智能巡检综合管理平台:
作为一站式监控管理平台,支持接入巡检机器人、定点摄像机、热像仪、传感器等IOT设备,形成以机器人为核心的综合智能巡检管理平台,提供多种图像、视频算法模型实现人、设备、环境等多目标识别分析。平台基于B/S架构的WEB数据浏览模式与运行平台构成,一般部署在中控室服务器中,支持MODBUS、IEC61850、CAN、MQTT、HTTP、RTSP等多种标准工业协议集,可实现外部系统与智能巡检系统综合管理平台的数据交互和联动。平台支持多账号同时登录,多角色分布管理。包括了实时视频查看、红外热成像查看、传感数据查看、告警信息查看、机器人运行地图查看与设置、云台预置位设置、录像回放、报表查看、机器人管理等全面功能。
智能巡检机器人
系统整合计算机编程技术、AI图像识别和定位技术、模式识别技术、无线信号传输技术、智能控制技术、机电控制技术、多传感器融合技术等多种高新技术手段,集软件、机械、电子、控制、传感、材料等多学科于一体,通过对图像、声音、温度、振动等数据的采集,完成设备运行状态,仪表数据,控制柜指示灯状态等巡检任务,在不影响现场系统设备的正常运行、不遮挡人员巡检通道及消防喷淋等设备条件下,最大限度的实现无死角、无盲点的巡检,达到井下变电所无人或少人值守。
机器人AI中央控制台具备多机协作调度、任务规划、高复杂环境感知等多种高阶控制算法;数据协议分发、数据采集清晰分析、支持多种标准协议接入等数据处理手段;图像识别、音频采集、气体检测等多种智能算法;支持摄像头、传感器、第三方系统独立设备等外部独立设备或系统接入。
智能巡检机器人系统主要由履带式巡检机器人(NVIDIA Jetson主控算力不低于20TOPS 可运行ROS/ROS2)、充电底座及配电单元、软件平台、供电平台、通信平台、定点摄像头及其他辅助设备组成。
智能巡检机器人平台
平台根据四合一气体传感器设置实时报警,检测的气体为:氧气、一氧化碳、一氧化氮、二氧化氮
低报警数值:19.5%Vol、35ppm、14ppm、2.5ppm
高报警数值:23.5ppm%Vol、70ppm、75ppm、5ppm
系统采用多种终端设备及管理系统有机结合,整合计算机编程技术、图像识别和定位技术、模式识别技术、无线信号传输技术、智能控制技术、机电控制技术、多传感器融合技术等多种技术手段,基础配置功能包括地图扫描、巡逻任务制定等配置功能,实时监控功能包括实时视频展示、实时数据展示、远程控制、远程对讲、告警查看、巡逻报告查看等功能,满足管理人员通过移动客户端进行监控的目的,提升事件处理效率,最大限度的实现无死角、无盲点的巡检,达到井下变电所、水泵房无人或少人值守。
暂无特定尺寸,如需详谈请联系本公司技术员 高先生17625000096


